
Описание
Введение
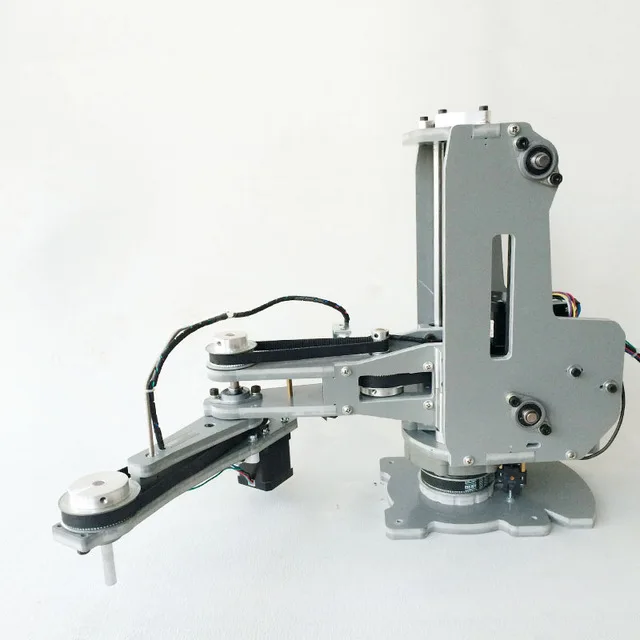
Четырехосный шаговый двигатель, структура scara, подходит для Учебный Эксперимент, также может сделать легкий фактический работы, нагрузка 2 кг
Обратите внимание: Этот продукт является только частью корпуса манипулятора, без водителя двигателя, системы управления и мощности, как показано на картинке, видео только для понижения цели.
Роботизированная рука от китайского производителя параметры:
Роботизированная нагрузка на конец руки 2 кг (включая вес привода) Размер большой руки: 200 мм Размер предплечья: 150 мм Z-axis подъемный ход 150 мм Талия может поворачиваться на 360 ° + Стандартные четыре оси: вращение талии, Вращение руки, Вращение руки, вращение запястья. Четырехосный 42 шагового двигателя. Модель: 42BYGH47-401A два гибридный шаговый электродвигатель (Красная и синяя линия-одна группа, черный и зеленый-одна группа. Красный-A +, синий-A-, черный-B +, зеленый-B-) Максимальный ток привода: 1.5A напряжение вождения: 24 В Номер провода: 4 Угол наклона: 1,8 градусов Температура поверхности: 80 ℃макс (при номинальном токе) Максимальный момент при неподвижном Роторе: 0.55N.M Фазовое сопротивление: 1,6 Ω Роботизированная рукоятка резерва 70 см свинца. Основная пластина роботизированной рукоятки-ПВХ. Роботизированная рука от китайского производителя наружный размер контура: L500mm * W180mm * H350mm Вес части тела: 7,5 кг Объем Вес после упаковки: 12 кг Таблица размеров: (мм)

Отгрузочная ведомость
Установленная механическая рукоятка с сервоприводом: 1 комплект (без драйвера двигателя, без контрольной части, без питания)





Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Характеристики
- Сборка
- Детали дистанционного управления и комплектующие
- Соединители / обмотка
- Тип транспорта
- Машинки
- Детали для тюнинга и запчасти
- Переходник
- Габаритные размеры
- other
- Периферийные устройства для дистанционного управления
- Приемники
- Расходный материал для инструментов
- Режущий
- Номер модели
- other
- Бренд
- smaring
- Технические характеристики
- Значение 2
- Материал
- Металл

