





Описание
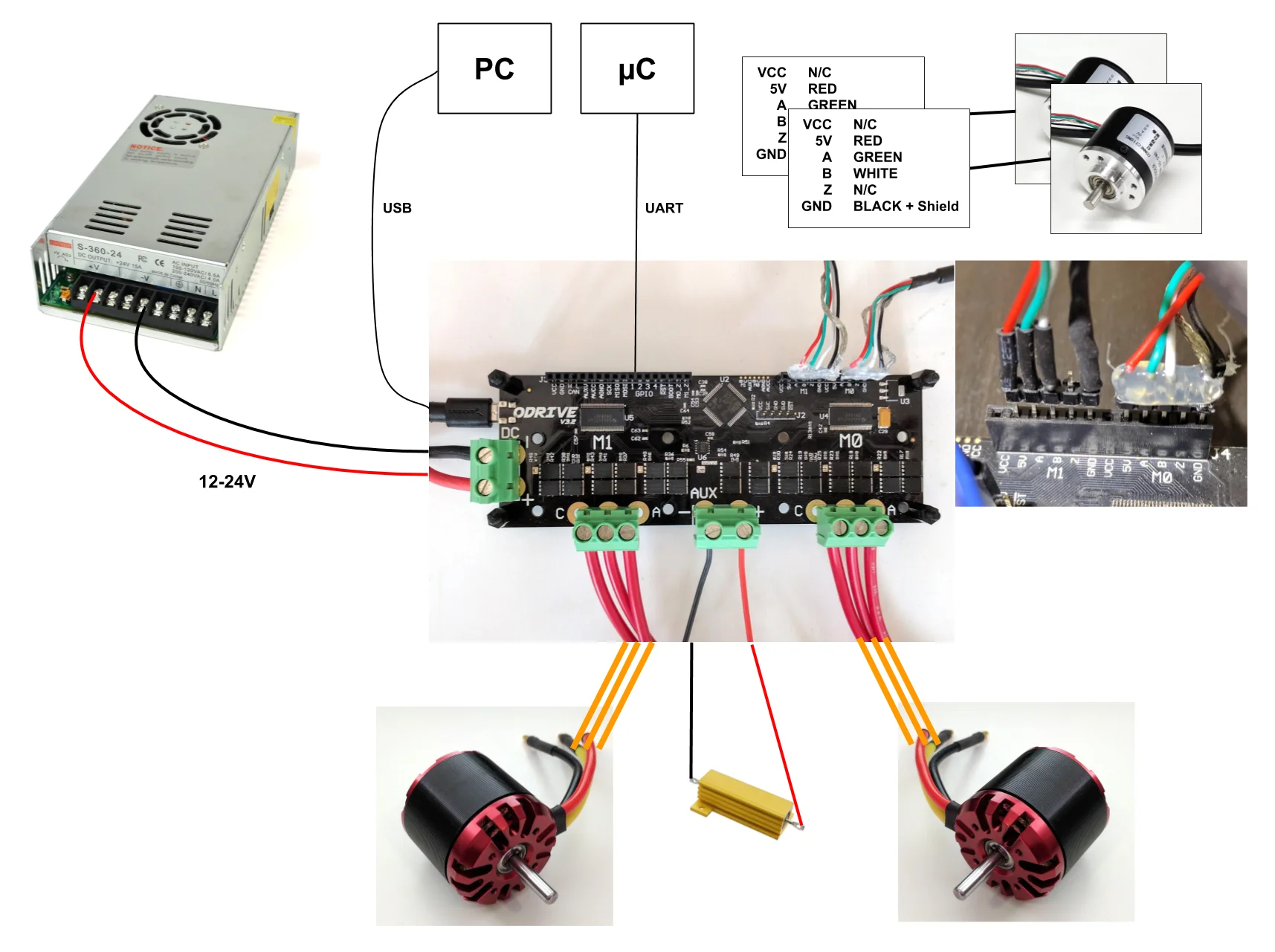
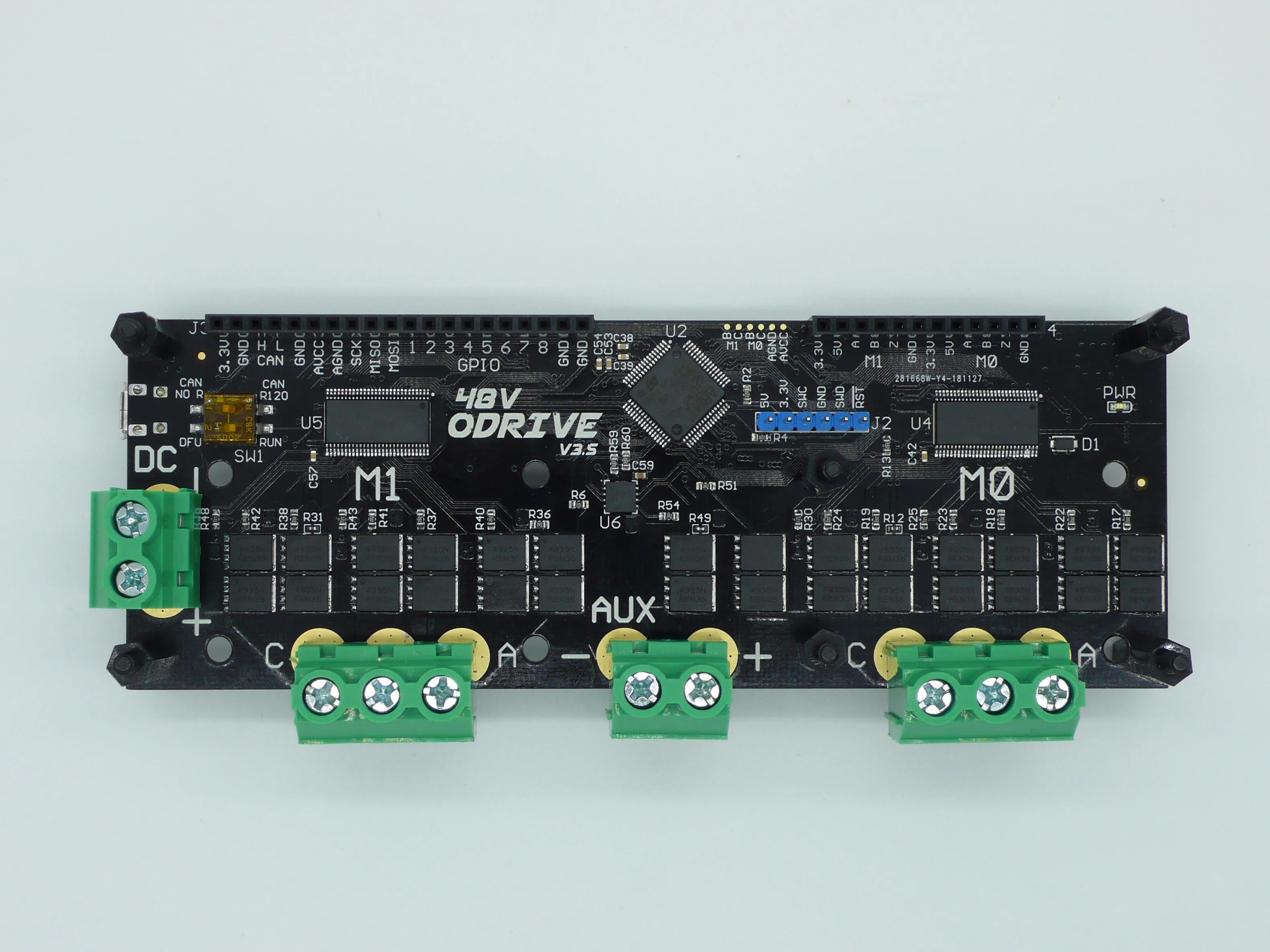
Обновление оборудования ODrive до версии V3.5 четырехслойной проводки PCBТрехконтурное управление: скорость, положение, токODrive V3.5 доступенПрошивка ODrive сгорела и протестирована для хорошей доставки.С Силовой РезисторЗагрузка: https://pan.baidu.com/s/1PSq2Aw5WiMFYGk0rPBw7Ag Этот проект предназначен для бесщеточных двигателей с наземным приводом и является дешевым. Цель-использовать недорогие бесщеточные двигатели в высокопроизводительных робототехнических проектов.Начало работыНачните Тестирование с одного двигателя и энкодера, никаких проблем, даже рекомендуется. Убедитесь, что между кодировщиком и мотором есть Хорошее механическое соединение, которое может привести к аварийным колебаниям. Все немощные I/Os имеют выход 3,3 В и допуск на вход 5 В, за исключением: в ODrive v3.2 и более ранние версии GPIO 3 и GPIO 4 не поддерживают 5 В. Вам нужны один или два бесщеточных мотора, Квадратурные инкрементные кодеры и Силовые резисторы. Требуемое значение сопротивления мощности зависит от настроек двигателя и максимальной/средней мощности смещения. Хорошей отправной точкой является резистор на 0,47 Ом, 50 Вт. Подключения двигателя до 3-х фазный винтовые клеммы и подключите источник питания резистор к вспомогательному терминал. Подключите блок питания (12-24 В) к клемме постоянного тока, чтобы обеспечить внимание к полярности. Не применяйте электричество сейчас. Подключите кодировщик к J4. A, B фаза требуется, Z (индекс пульса) опционально. Линии A, B и Z имеют импульсный резистор 3,3 k для выхода датчика открытого стока. Для односторонних нажимных сигналов со слабыми токами привода (







Характеристики
- Материал
- Пластик
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали дистанционного управления и комплектующие
- Компоненты двигателя
Сопутствующие товары







